|
|

| It is the light and soft polymer actuator developed for the first time in the world. This actuator forms the electrode by special chemical plating, and improves the displacement performance greatly by enlarging the surface area of the electrode. This is composite materials of the polymer and the metal. It moves quickly and greatly by the low voltage of about 2V. | |||
| پ@Feature |  Photograph in cross-section of actuator. The electrode of actuator has fractal-like structure. | ||
| 1. A motion is electrically controllable. | |||
| 2. It is softness about the same as muscles. | |||
| 3. Since it almost consists of polymer, it is light. | |||
| 4. It is completely silent when driving. | |||
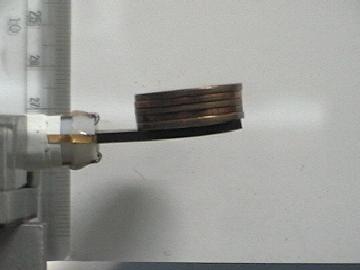
| 5. Generating power becomes large by enlarging size. | |||
| 6. A thin device can be made by using the actuator from 0.1 to 10mm. | |||
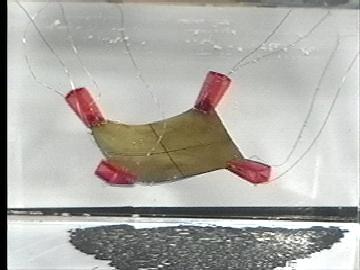
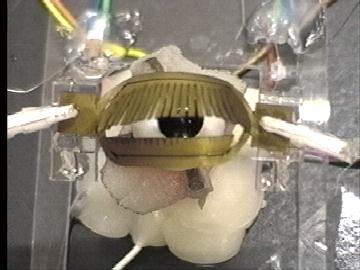
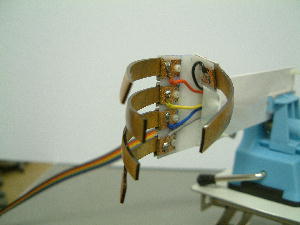
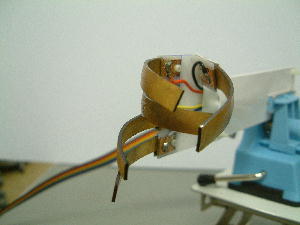
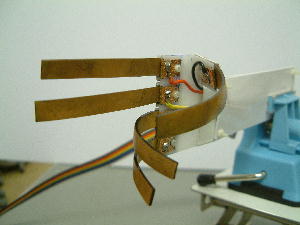
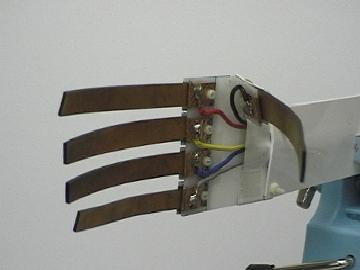
| 7. Movement like the living thing is obtained by combining the actuator elements. | |||
| 8. It is possible to move with low electric power (about 0.05 to 0.2W). | |||
| 9. It can be worked for a long term (one year). | |||
| 10. It works in water or air. | |||
| 11. The electromotive force is generated while depending on the deformation of the actuator. | |||
| It has many excellent characteristic that is nothing on the conventional motor.A new innovative device can be designed. |
‚PپDBasic operating characteristic |
| The element is made of ion-exchange polymer, and is the hardness about muscles of a living body. Since it is soft, generating power greatly depend on the sizes and structures of actuator. Response frequency also depend on prudence and length. |
| ribbon sahpe | ||||
|---|---|---|---|---|
| (mm) | 0.2tپ~1پ~20 | 0.2tپ~1پ~5 | 0.5tپ~3پ~10 | 1tپ~3پ~10 |
| Response frequency(Hz) | 50 | 500 | 30 | 20 |
| Displacement(mm) | Three rotations | rotations | rotations | 1/2 rotations |
| Speed(mm/sec) | 50 | 100 | 30 | 20 |
| Generating power(g) | 0.02 | 1.0 | 6.0 | 40 |
| donuts shape | ||
|---|---|---|
| (mm) | 0.5tپ~10ƒس | 0.5tپ~30ƒس |
| Response frequency(Hz) | 30 | 30 |
| Displacement(mm) | 0.5 | 0.5 |
| Speed(mm/sec) | 0.5 | 1 |
| Generating power(g) | 20 | 70 |
‚QپDWorking Principle |
| The mechanism of the bending motion |
| is due to uni-directional electro-osmosis by cation, with their polar solvent, toward the cathode. Solvent enrichment at the cathode and depletion at the anode cause bending due to differential swelling and shrinkage. |
‚RپDDesign for Actuator |
| Ion conductive actuator does various operation depending on
the following condition.
Generating power becomes large by enlarging thickness.پiFigure of thickness vs powerپj A motion changes with the shape cutting from the film and the shape of a casting. پiFigure of element length vs powerپj The generation power depends on the rigidity of the actuator and the position of the fulcrum. Large power is generated if there are a lot of fulcrums. A tube actuator enables bending of all directions. A curved direction can be controlled by making the insulation ditch. Moreover, because the resistance of each insulated actuator changes by making the insulation ditch, various movements can be made. It moves in the counter direction respectively. Because the displacement rate and the amount of displacement depend on the kind of the ion, it is possible to select it by the usage. The displacement, the displacement rate, and the position can be controlled by a low electric power. The displacement rate can be controlled even by one cycle or less. Movement near the living thing is possible. The voltage depends on the distance from the terminal because the actuator has a little electric resistance. Therefore, because displacement depends on the > distance from the terminal, movement can be controlled by the position of the terminal.
http://www.eamex.co.jp/product_e_new.html پ¦Those who wish to develop jointly Please inform web@eamex.co.jp. Windows Media Player is required for animation reproduction of this page. ƒgƒbƒvƒyپ[ƒW‚ض Unapproved use of the picture in Book HP, image data, etc. is forbidden. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||